top of page
Denis Kartachov
Mathematical Modelling & Game Programming
Virtual model of a Feller Buncher
(May to Aug. 2020)
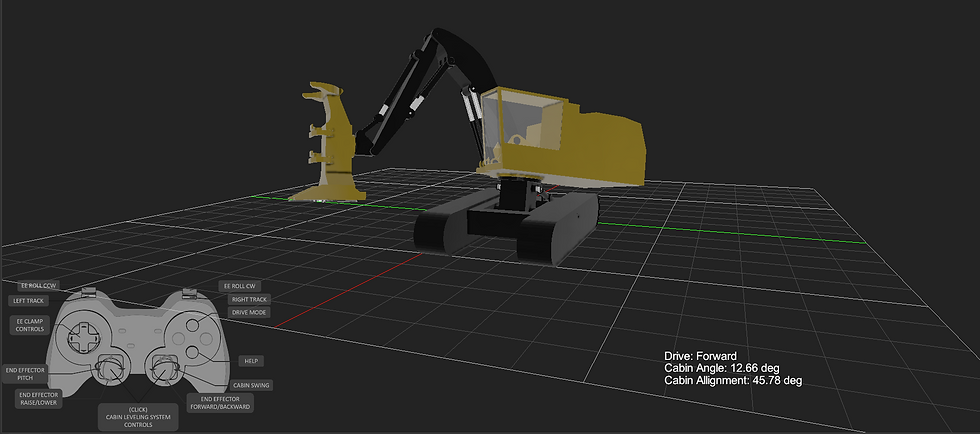
I worked as an engineering research assistant at McGill university as part of the Forestry Automation Team, whose main mission is to bring automation systems into the forestry industry. Supervised by professor Inna Sharf and working in tandem with her doctoral students, I designed a virtual model of a forestry machine called a feller buncher. The model was created using the real-time simulation software Vortex Studio, developed by private Montreal-based company CM Labs Simulations.
Motivation
The motivation behind this project was three-fold:
-
The creation of a digital twin allows for full kinematic and dynamic analysis of the machine's operation without needing to operate a real machine.
-
Autonomous control strategies can easily be integrated into the model.
-
The virtual model can be used as a test bed for dynamic stability and motion planning algorithms.







1/1
Accomplishments
During the project, I completed the following tasks:
-
Created a scaled-down model based on a real Tigercat L855E feller buncher
-
Designed a rough 3D model of the machine using CAD software Solidworks;
-
Polished the 3D model in Blender and incorporated materials & textures for aesthetic purposes.
-
-
Implemented the 3D model and developed the virtual machine in Vortex Studio
-
Configured inertial properties of machine parts (mass, center of mass, inertia matrix);
-
Created the collision geometry of the machine;
-
Implemented kinematic constraints to configure the machine's degrees of freedom;
-
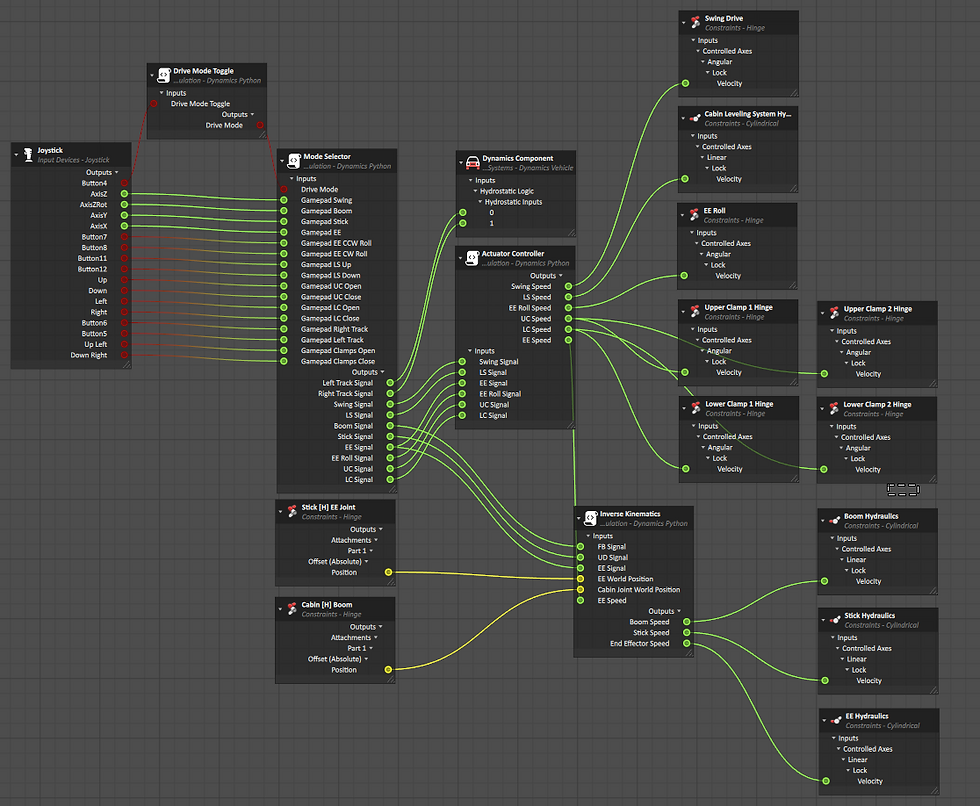
Created a kinematic diagram of the arm and derived the inverse kinematic equations relating the end-effector position to the joint angles;
-
Developed a joystick controller using Python and Vortex Studio's built-in visual scripting editor;
-
Implemented a hydrostatic transmission model into the virtual model to simulate the main method of propulsion using continuous tracks;
-
Implemented a hydraulics model to simulate the operation of the arm using hydraulic cylinders;
-
Created a leveling system which allows the cabin to level itself on sloped terrain.
-
-
Designed a research poster
-
Participated in a research poster exhibition hosted by McGill University;
-
Participated in the 2019 NESERC Canadian Robotics Network (NCRN) hosted by Queen's University in Ontario, Canada.
-
bottom of page